



果蝇幼虫的胸部和腹部有独立的神经系统。这种分散控制机制实际上可以帮助它们非常有效地移动。
中央系统指挥控制复杂系统的益处往往显而易见。比如通过大脑控制眼睛和腿,我们才能走直线。但这类系统,无论是天然的还是人造的,偶尔也会出现严重漏洞。美国最近部分政府停摆期间,其社会经济活动的重要领域严重受损。这生动说明了当一个国家的中央控制单元突然关闭的话会产生什么样的后果。神经退行性疾病中脑细胞的死亡日益摧毁身体的控制者(大脑),显示了生物系统也具有同样弱点。
避开中央系统机制有其优点。缺少一个“大脑”来指导行为意味着单个部件的缺失对集体的行为影响很小。由乔治华盛顿大学的物理学家尼尔·约翰逊(Neil Johnson)领导的一个研究小组开发了一个分散系统模型,该模型成功地模拟了果蝇幼虫的运动。这项研究于2月6日发表在《科学进展》(Science Advances)杂志上。研究表明当模型的单个部分功能较弱时,其表现最佳——组件越简单,整个系统效果越好。相比之下,集中式系统的组成部分只有经过改进后,其功能才会更好。研究人员认为,这一发现有可能影响多个领域,从无人驾驶汽车的设计到神经系统疾病的治疗再到组织结构的各个方面,甚至可能对理解进化过程有启示作用。
分散控制的例子在自然界的生物中比比皆是,在细菌、粘液菌和蚁群中都能找到。约翰逊在观察中获得灵感:由于果蝇幼虫的神经回路非常简单,在运动过程中,果蝇幼虫的各个部分以半独立的方式活动。这是单一生物体中分散控制的一个例子,与蜜蜂或其他具有集体行为的动物所体现的“群体智能”截然相反。尽管没有中央系统协调果蝇幼虫身体的各个部分,但它们总能实现向期望温度移动的目标——这一过程被称为趋温性。
果蝇幼虫通过收缩身体向前蠕动。当幼虫部分身体延展而另一部分收缩时,它们就会转弯。热敏神经元决定了果蝇身体各个部位的运动,这些运动的综合效应决定其转向角度。约翰逊说:“幼虫的协调运动方式类似于人群协调移动从而到达出口。并不是大家相互电话告知往出口走,而是根据外界信息,这种集体聚集行为自然而然就会发生。”
研究人员创建了一个数学模型,该模型使用独立的组件再现幼虫的运动,这些组件将过去运动的结果存储在记忆中(如果结果表明模型与目标方向很好地一致,则定义为1,否则定义为0)。每个组件通过参考一组“策略”根据过去的结果选择下一个动作(左转还是右转),这些策略将过去不同的结果集合与不同的转弯方向联系在一起。研究人员将所有可能策略的不同子集分配给不同的模型组件(与幼虫中半独立的部分相对应),在某种程度上改变它们的行为——每个模型代理在每一步都选择了最佳策略。研究小组发现这个模型产生的爬行轨迹,看起来非常像幼虫爬行的真实数据,这使得他们相信自己捕捉到了真实系统中的一些本质。圣达菲研究所(Santa Fe Institute)的数学家大卫·沃尔伯特(David Wolpert)没有参与这项研究,他说:“这项研究能和果蝇的爬行轨迹匹配起来真的很棒。表明我们在理解这些问题方面迈出了很好一步。”
这一关键发现与组件的记忆规模的变化有关。在记忆容量非常小的情况下,模型表现得很差——但是在容量超过一定大小之后,它的性能也会逐渐变差。
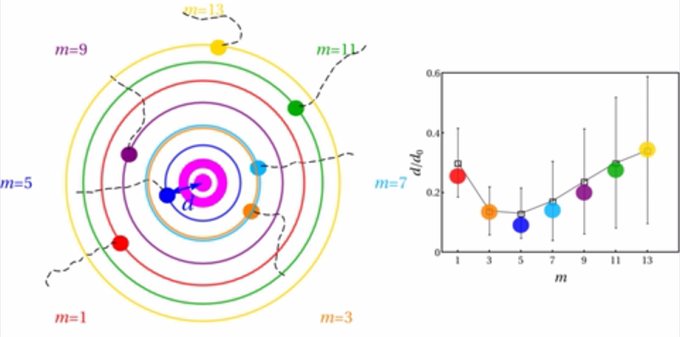
如果一个系统的组成部分变得过于聪明(这里用“m”变得越来越大来表示越来越聪明),那么这个系统就会离预定目标(d区)越来越远。图片来源:Pedro D. Manrique
研究人员使用“群体/反群体”理论来解释这一结果,该理论是单独的组件如何形成一个拥有一致行为的群体的数学描述。当记忆容量很小时,就会形成大量的组件,朝着同一个方向推进。它们先是大转弯,然后突然转向另一个方向,产生夸张的之字形运动。如果这些组件有太多的记忆,群体就会被长久以来由过去的结果所决定的策略所困,而没有充分考虑到表明他们偏离了方向这一眼前信息。
在这两个极端之间会出现一个最佳规模,即使用相反策略的中等规模的群体,就像赛艇时船的两边都有一半人在划桨一样。约翰逊说:“当你增加记忆时,就相当于过度思考。有太多历史,就会强化过去的偏见。”沃尔伯特说,有时单一组件处理问题时也会产生类似的效果。他表示:“当人们(根据过去的价值观)预测股市时,他们小心翼翼,不去过多关注过去的见解。因为太关注过去会带来杂乱,学习起来更加困难。”
该团队声称,这项工作可能提供一种新的思路,来思考进化是如何实现从天然的分散设计(如细菌)跨越到使用集中设计的人类等生物的。这意味着,在分散设计中,在不切换到集中设计的情况下,组件的的“聪明”程度会有一定的限制。该小组下一步计划研究用激光摧毁果蝇幼虫的部分神经回路(有点像划桨时部分桨手丧失功能)如何影响运动。研究小组还想通过类似于将两个桨手绑在一起,或者在愚笨的划手中间插入一个拥有超级记忆的划手的模式来探索这个模型的行为。最终,约翰逊希望能从该模型中寻求可能的医学意义。未来的研究将探索在帕金森症等疾病中,给某些肌肉提供有限的反馈是否有助于抑制由大脑控制信号受损引起的震颤。约翰逊说:“我们将考虑在患有一般运动神经元疾病的情况下,申请经费准确完成这一研究。我们不知道它是否实际可行,但在我看来,我们至少已经证明了它在理论上是可行的。”
本研究可能应用的其他领域包括无人驾驶汽车设计和组织表现。然而,沃尔伯特很谨慎。他说,该研究没有将该模型与其他任何模型进行比较,因此体现的分散控制优于集中控制的方面并不多。他指出,工程系统可以通过简单的复制来减轻单个控制的不足。但也有不适用的情况,当一组机器人士兵在执行特殊任务时,作为一个整体,它们工作时需要保持无线电静默。“机器人不允许交流,所以它们必须以分散的方式运行,”他指出,“这些结果表明,作为(设计)工程师,为了实现总体目标,至少应该考虑限制机器人的认知能力。”