
电气百科:工业机器人分拣工作,应用领域分析
工业机器人是如何进行分拣工作的
自从工业机器人加入到了制造业,它给企业带来了日新月异的变化,因此工业机器人在各个领域的应用是越来越广泛了。今天我们说一下工业机器人中的并联机器人,并联机器人因为有着速度快、刚度高、重量轻等等的优点,广泛的应用在食品、药品点在等等行业中,它在分拣、理料、装箱等方面都有着绝对的优势。
在最常见的分拣流程中用到的并联机器人主要是由综合传感器、工业相机和编码器等等的感应识别系统组成的。并联机器人可以根据产品的不同颜色、形状或是不同的要求质量,进行筛选分拣作业。当流水线出现了产品堆积时,并联机器人就会通过视觉系统在三维空间中标注出产品堆积的坐标以及位置,利用空间自由度抓取,解决产品堆积的问题。
并联机器人只是工业机器人的“大家族”里的一员,伴随着工业自动化的不断发展,企业也会不断地创新优化自己产品,借以提高自己的竞争力,在未来工业机器人将会有更大的发展。

微信公众号
工业机器人从应用领域分布来看催生行业新需求
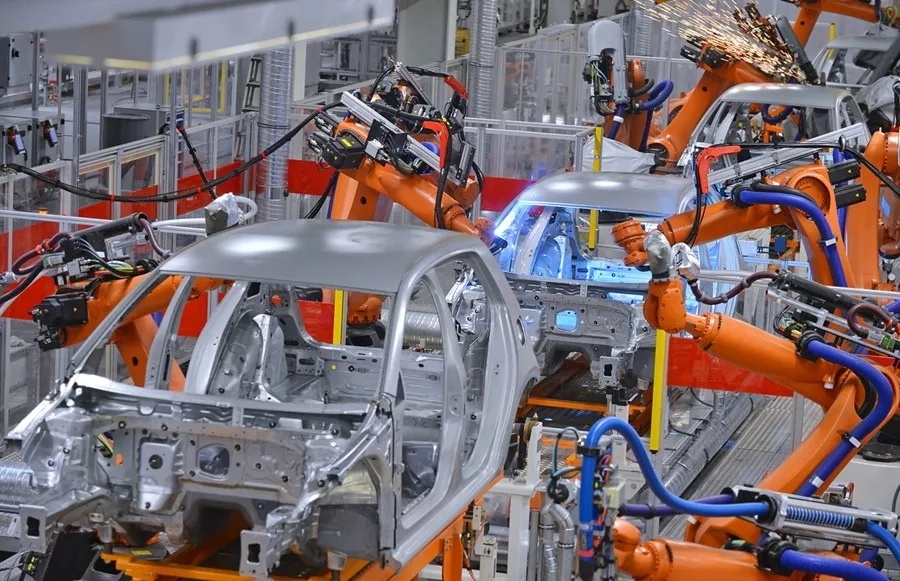
工业机器人从应用领域分布来看,汽车与电子电机制造为目前两大主要应用领域,市占比例分别约3成,而其主要使用场景则以搬运、焊接与上下料为主。不过,除了源自于缺工效应下自动化需求比例提高,工业机器人在AI、感测技术的加值下带来新的能力延伸其功能性,有别于以往操作规则性的任务。
当前具有认知学习能力与自主调适能力的智能机器人能够依据行业需求设计出特用功能以适应复杂的工作场景,也因此使其应用触角延伸至更多新兴行业应用。
在量产模式时代,为发挥最高生产效率与节省人力成本,诸如上下料此种高度重复性,或是机床上下料繁重且具有危险性的工作,一般都交由工业机器人操作,主要适应对像为大批量、重复性强或是工件重量较大的情况下使用,此为目前常见的上下料机器人应用。
不过,由于此种机器人大多执行重复性作业,任务设定单纯,其运动路径与取放动作相对必须设计在固定模式下进行,因此在前置作业通常仍需要额外透过人力将来料排列整齐再等待夹取上料,这也是当前上下料应用灵活度不足,而期待能够有所改善之处。
简言之,自动化上下料只解决了问题的一半。相比人类,对机器人来说,从容器中取出随机排放的零件,再将其精确地放入机器中却是困难重重。为改善此应用缺陷,市场积极发展机器人随机取放( Random Bin Picking)技术,同时结合AI、3D视觉,可借此识别物件包括位置、姿态与摆放顺序等信息,透过AI自适应夹取路径与取放动作,由于工件不需事先整理及排列即可被识别,因此能有效提升许多工厂的生产效率。
在金属加工产业中,不如焊接机器人的普及,研磨与抛光两个制程至今仍大量仰赖人工作业,由于像是水五金制品具有如孔洞、多重曲面的复杂外形,因此其较难以导入自动化。不过,目前国内水五金产业在研磨抛光制程的缺工越来越严重,促使市场对于研磨抛光机器人的需求增强,而在3D视觉与虚实整合系统辅助下,对于具有复杂研磨抛光路径需求的机器人来说,可降低其在路径生成的难度,并达到加工稳定。
值得注意的是,除了汽车、电子电机以及机械金属加工产业为主要应用领域,工研院产科国际所分析师黄仲宏观察,目前包括纺织、制鞋、食品加工等轻工业的机器人装机量也正成长中,渐朝自动化、智能化发展。例如制鞋业在涂胶制程与研磨抛光遭遇相同加工路径复杂之问题,现也透过3D视觉引导改善,或有厂商开发协助成衣业者改善打样流程的机器手臂。
我国的工业机器人发展如何才能大跃进
我国的工业机器人正从传统的汽车制造行业向机械、电子、化工、轻工、船舶、矿山开采等领域迅速扩展。工业机器人技术越来越受到人们的关注,机器人基础与前沿技术的深入发展,使得新产品不断地涌现在市场中。
我国机器人产业发展势头、产业规模与市场空间都不断扩大,但与瑞士ABB、日本发那科、日本安川、德国库卡这“四大家族”相比,还是存在一定的差距,如核心零部件尚有待突破,精密减速器、伺服电机、控制器等核心部件的质量稳定性和批量生产能力有待全面提升。我国工业机器人专业人才缺口较大,虽然企业和科研机构对机器人技术研究与本体研制方向的人才引进与培养力度不断加强,但现场调试、维护操作与运行管理等应用型人才的培养力度依然严重不足。
当前,我国机器人产业发展正面临着机遇和挑战,怎么把握趋势,将这些不足之处转化为动力是行业发展的关键。这就需要政府与企业进行合作,打造好我国的机器人市场,推动我国机器人行业的不断壮大。
工业机器人的广泛应用,如何挑选合适的工业机器人
工业机器人的广泛应用让越来越多的企业和工厂有了更好的发展,随着人工的减少,很多的中小企业也开始选择了工业机器人,但工业机器人的种类很多,怎么选择适合生产的工业机器人呢,今天我们就来简单的说一下。
应用场合。要先考虑机器人是用于什么样的场合以及需要什么样的制程。若是应用制程需要人工和机器共同完成,尤其是需要经常变换工位或移位移线的工作,以及配合新型力矩感应器的场合,协作型机器人就是一个很好的选择。
有效负载。是指机器人在工作空间内可以携带的最大负荷。如果机器人完成将目标工件从一个工位搬运到另一个工位,我们就需要注意要将工件的重量以及机器人手爪的重量加总到其工作负荷。特别需要注意的是机器人的负载曲线,在空间范围的不同距离位置,实际上的负载能力也会存在差异。
自由度(轴数)。机器人配置的轴数直接关系到机器人在活动时的自由度。如果是针对简单直来直去的场合, 4轴机器人就可以应对。如果应用在一个狭小的工作空间,同时还需要机器人手臂进行很多的扭曲和转动,6轴或7轴机器人就是最好的选择。
最大的作动范围。当计算机器人的应用场合时,还应该了解机器人需要到达的最大距离。选择一个机器人不是只看它的有效载荷,也需要综合考量所能到达的确切距离。借此判断,该工业机器人是不是适合特定的应用。在机器人的水平运动范围内,我们还要关注到到机器人近身和后方的非工作区域。
电气百科,工业视频,工业导航,工业科普,电的世界我最懂,让电尽其所能!